机器人自动涂胶在国内汽车灯具行业的成功应用
| 摘要:介绍了机器人自动涂胶在国内汽车灯具行业的成功应用;包括涂胶工作站系统组成、关键技术及实现方法;并对应用前景和经济效益进行了论述。 关键词:机器人;输胶设备;交叉往复移动式工作台。 0 概况 北京机械工业自动化研究所(以下简称自动化所)与天津市某汽车灯厂(以下简称用户)签订合作协议,承担了“(两个)车灯机器人自动涂胶工作站工程” 的研制任务。该项目在自动化所科研人员与用户技术人员的努力工作和通力协作下,取得了圆满成功;它的成功应用是我国汽车灯具工业实现向规模化、自动化、高效化发展的良好开端,在国内汽车灯具行业产生了巨大反响。 本项目采用ABB 公司IRB1400 型6 自由度交流伺服机器人和美国Graco 公司BRLLDOG25 :1输胶设备系统,进行总体设计和系统集成,组成完整的自动涂胶工作站。工作站主要由以下主要设备组成: 1 车灯涂胶(生产)能力要求 根据用户要求,这两个工作站要完成: 夏利轿车前照灯、两厢尾灯的涂胶节拍为14s/ 只; 2 自动涂胶质量标准要求 根据用户要求,这两个工作站必须在满足生产节拍的情况下,达到以下涂胶质量标准: 3 涂胶工作站系统说明 3.1 工作方式 车灯自动涂胶机器人和操作人员分别在往复式工作台两端(见图1 ),一端为人工上下料工位,位于安全工作区,另一端为机器人自动涂胶工位,工件到位后位于机器人工作范围内。操作人员在上下料工位将待涂胶工件装入工装后踩动脚踏开关,工作台将工件由上下料工位传送至自动涂胶工位,工件到达自动涂胶工位后,给机器人一个启动信号,机器人便开始做涂胶工作,涂胶完成后机器人给工作台一个回程信号,已涂胶工件被传送至上下料工位,此时操作人员将已涂工件卸下,重复以上工作。 3.2 自动涂胶机器人工作站 ABB 公司IR1400 型6 自由度交流伺服机器人是一种关节式的编程示教型通用机器人。它具备与外围设备进行通讯的功能。具有高的加速性能、精确的轨迹跟踪和快速的转角特性,持重5kg。这种机器人的所有特性及工作参数都符合车灯自动涂胶作业要求。 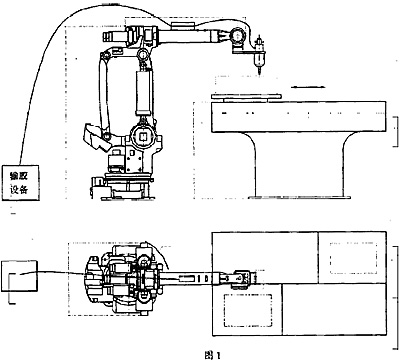 |