| ,流程简单,产汽量也较稳定,我们从操作人员的操作中得到启发,认为减少给水量的波动从而稳定给水温度成为该废热锅炉液位控制的要点。因此我们选用“以汽定水+液位前馈”比值控制方案,方案框图如图3所示。 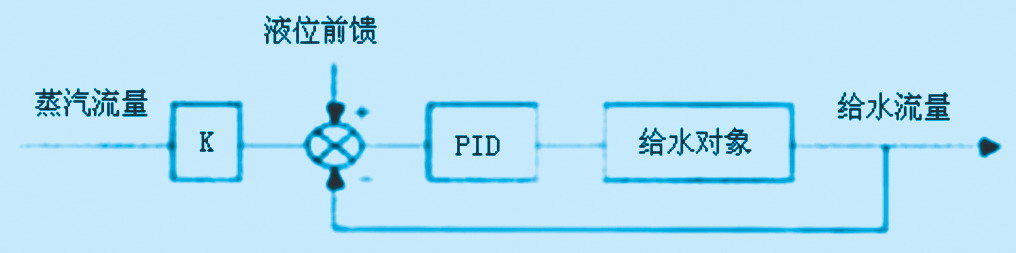
图3 汽定水+液位前馈比值控制方案框图
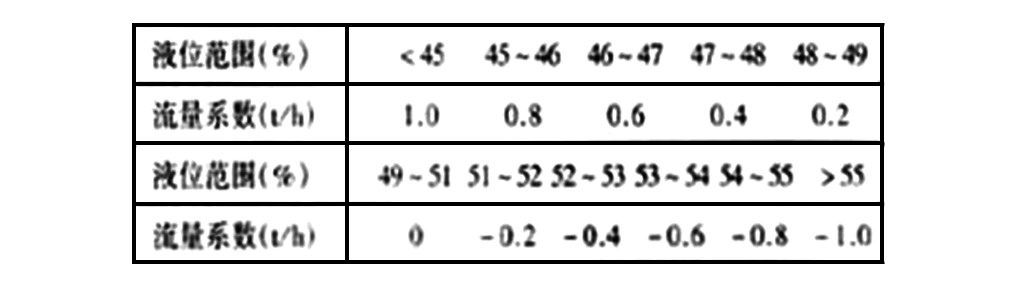
其中系数K为汽水损失率(给水流量与蒸汽流量的比值),范围为1.1~1.2。PID参数为P=300%、I=0.4、D=0。这组PID参数可以使阀位波动幅度不大而回路有较快的跟踪效果。液位前馈系数与锅炉额定负荷密切相关,一般是额定负荷越大前馈系数也越大。本项目废热锅炉的额定负荷为35t/h。前馈系数按表一给定,见附表:
附表 前馈系数表
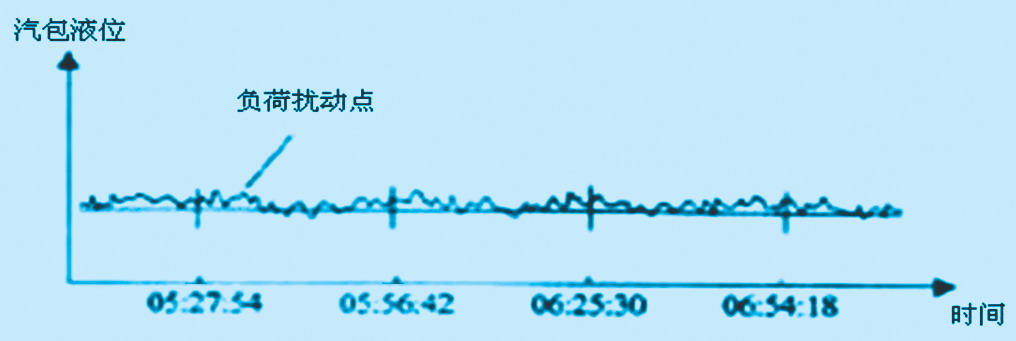 投运时首先投运给水流量单回路,调节平稳后,再切换为蒸汽流量比值控制,液位前馈同时起作用。以汽定水+液位前馈比值控制方案调试投运简单方便,投运后经负荷扰动(产汽量变化)、液位扰动(排污量变化)实验,抗扰动性能良好,投运以来运行平稳,达到工艺要求。图4为2.5h实时液位记录曲线,其中记录了负荷扰动情况。液位波动范围<±3%。
 4 永宏PLC PID控制系统分析
4.1 带PID控制功能的FATEK可编程控制器
PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,作为国产PLC企业,永宏电机股份公司一直致力于PLC的研究开发工作,带PID控制功能的FATEK可编程控制器(PLC)就是利用其闭环控制模块来实现锅炉汽包液位的PID控制,在异常情况下,如液位偏离正常值较大时,通过PLC控制系统控制,可以快速恢复水位,保证锅炉的安全稳定运行。当水位控制和主蒸汽温度控制发生矛盾时,可根据矛盾的主要方面进行两者的协调控制。它包含给水流量控制回路和汽包水位控制回路两个控制回路,实质上是蒸汽流量前馈与水位-流量串级系统组成的复合控制系统。当蒸汽流量变化时,锅炉汽包水位控制系统中的给水流量控制回路可迅速改变进水量以完成粗调,然后再由汽包水位调节器完成水位的细调。图5是有永宏PLC组成的控制系统示意图。
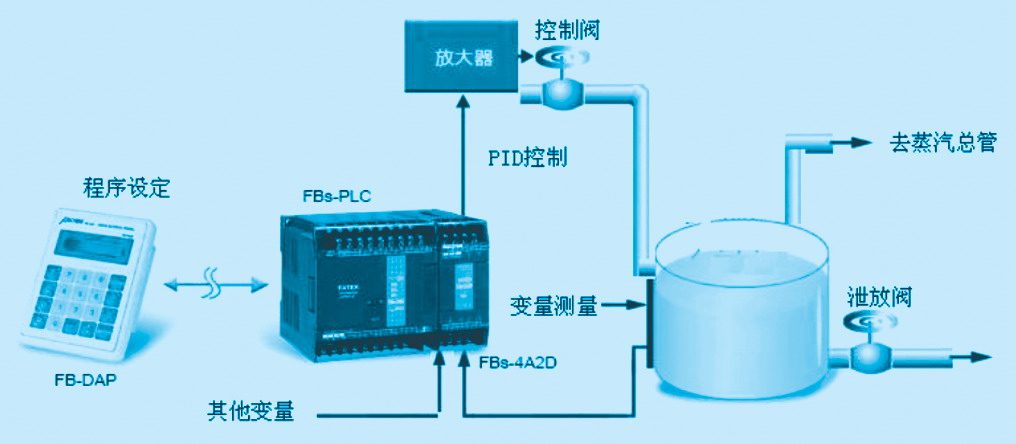 图5 永宏PLC控制系统示意图 4.2 汽包水位PID控制设计优点
(1) 减少干扰对主回路的影响,可由副回路控制器予以校正。
(2) 由于副回路的存在减少了相位滞后,从而改善了主回路的响应速度。
(3) 对控制阀特性的变化具有较好的鲁棒性。
(4) 副回路可以按照主回路的需求对对象实施精确控制。
实际PLC的控制程序采用主副回路进行串级控制,即主回路的输出做为副回路的设定值,经副回路输出作用于被控对象。也可以不用副回路只用主回路形成单回路调解,或手动操作完成。一般常见的过程控制应用, 开环回路控制就可以满足大部份的应用要求,但随着使用时间、组件特性变化或受控负载或外界工作环境的变化,开环回路控制因为没有真实将受控程序的实际量反馈到控制器,因此控制结果可能与实际期望的结果会有些落差,闭环回路PID过程控制是用来克服并解决上述缺点的极佳选择。FBS-PLC提供软件数字化的PID数学表达式,对于一般反应的闭环回路过程控制就可应付,但对于工业锅炉这样的需要有快速反应的闭环回路控制要使用本功能需要事先评估是否可行。典型的闭环回路程控示意图如图6所示。
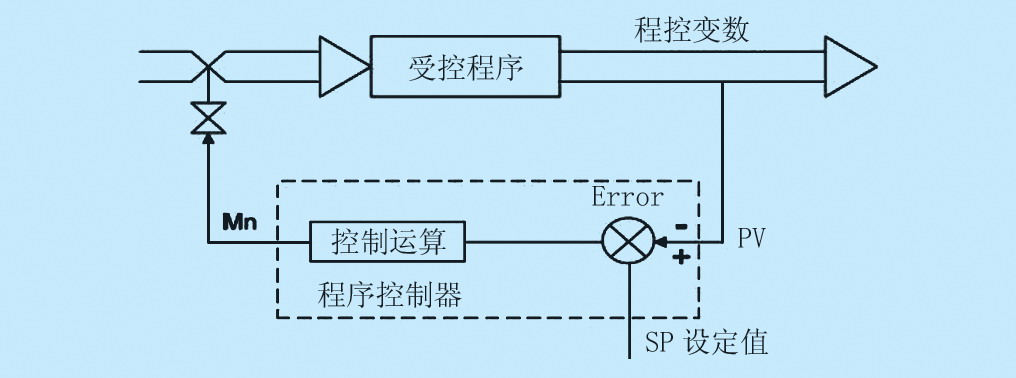 图6 典型闭环回路程控示意图 图6 典型闭环回路程控示意图 根据应用要求,用户将PID 控制器设定成比例+积分+微分控制器,其控制器的数字化数学表达式如下: Mn:“n”时的控制输出量
D4005:增益常数,默认值为1000;可设定范围为1~ 5000
Pb:比例带(范围:1~5000,单位为0.1%; Kc(增益)=D4005/Pb)
En:“n”时的误差=设定值(SP)-“n”时的过程变数值(PVn)
Ki:积分常数( 范围:0~9999,相当于0.00~99.99 Repeats/Minute)
Td:微积分时间常数(范围:0~9999,相当于0.00~99.99Minute)
PVn:“n”时的过程变数值
PVn-1:“n”时的上一次过程变数值
Ts:PID运算的间隔时间(范围:1~3000,单位:0.01S)
Bias:偏置输出量(范围:0~16383)
加上微分项的控制器,目的在于消除程控系统的过度反应,进而使程控系统能够平稳缓和达到稳定。虽然微分项有上述优点,但因其对输出量的贡献相当灵敏,大部分的应用不必使用微分项而将Td设定为0。PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、 |